在这个Lab中,我们将要实现基础的内核设施,让一个被保护的user mode environment成功运行(比如process)。我们将要去实现一个可以跟踪用户environment的数据结构,创建一个单独的用户environment并且把一个程序的镜像加载到里面,最后还要运行它。我们也会让JOS有能力去处理任何的system call并且处理它产生的异常。
上述中,术语
environment和process是可以交换的,他们都指向一个抽象的东西,可以让你运行一个程序。我们使用environment而不是传统的process是为了强调JOS environment和UNIX进程提供的是不同的接口。所以在不好理解environment的时候,我们可以拿process的概念来理解。
经过Lab3中git的相关操作之后,Lab3多出了以下这些文件
同时一些文件中的内容相对Lab2来说也有修改。可以输出git diff lab2来查看。
Part A: User Environments and Exception Handling
inc/env.h中包含了JOS中用户环境的基本定义,在该文件中内核使用Env这个数据结构去跟踪每一个用户环境(user environment),并且在kern/env.c中有三个全局变量是跟enviroments有关的:
struct Env *envs = NULL; // All environments
struct Env *curenv = NULL; // The current env
static struct Env *env_free_list; // Free environment list
-
envs是Env结构体的数组,代表系统中所有的environments,在JOS内核中将最多同时支持NENV个活动的environments,虽然任何时候运行的都比设定的少的多(NENV定义在inc/env.h),一旦envs被分配了,那么envs对于NENV个中每一个可能的environment都将有一个Env数据结构实例; -
env_free_list包含所有的不活跃的Env结构体,这种设计使environment分配与释放变得容易,因为他们只要向这个链表添加或者移掉一个结构体即可; -
curenv表示当前执行的environment,在第一个environment启动之前,curenv是被初始化为NULL的;
下面讲一下Env结构体,如下所示(下面只是暂时的,在Lab的实现过程中,我们还会往这里面加字段):
struct Env {
struct Trapframe env_tf; // Saved registers
struct Env *env_link; // Next free Env
envid_t env_id; // Unique environment identifier
envid_t env_parent_id; // env_id of this env's parent
enum EnvType env_type; // Indicates special system environments
unsigned env_status; // Status of the environment
uint32_t env_runs; // Number of times environment has run
// Address space
pde_t *env_pgdir; // Kernel virtual address of page dir
};
-
env_tf
这个结构体定义在
inc/trap.h中,是用于保存environment寄存器的值(当这个environment没有在运行的时候)。当从user转变到kernel模式的时候,kernel将寄存器的值保存下来,这样子这个environment可以从它离开的地方重新开始。 -
env_link
指向env_free_list上的下一个空闲的Env,env_free_list是指向list中第一个空闲environment。
-
env_id
唯一标志着当前正在使用这个Env结构体的environment(可以理解成PID)。当一个environment终止之后,kernel可能会重新将同样的Env结构体分配给不同的environment,但是这个新的environment将会有一个不同的env_id,即使这个新的environment使用了envs数组相同位置的slot。
-
env_parent_id
代表创建这个environment的environment的env_id(相当于一个进程中的父进程id)。通过这种id,environment可以成一个“family tree”,这在决定一个environment允许给谁做什么的时候是相当有用的
-
env_type
用于区别特别的environment,对于绝大多数来说这个值是
ENV_TYPE_USER. -
env_status
表示当前environment的状态,有一下这些值:
-
ENV_FREE:表明这个Env结构是不活跃的,那么因此是在env_free_list上
-
ENV_RUNNABLE:表明这个Env所代表的environment正在等待在处理上运行
-
ENV_RUNNING:表示当前的environment正在运行
-
ENV_NOT_RUNNABLE:表示当前的environment是一个活跃的environment,但是还没有准备好运行,比如正在等待来自另一个environment的进程间通信的信息
-
ENV_DYING:表示这个Env结构体所指的environment是一个zombie environment。一个zombie environment将会被释放在下一次捕获kernel之后。
-
-
env_pgdir
这个environment的页目录的内核虚拟地址
就像一个Unix 内核,一个JOS environment也将“thread”和“address space”的概念耦合起来。thread主要由保存的寄存器值定义(env_tf),addree space 由页目表和页表来定义(env_pgdir)。要想真正的运行一个环境,kernel必须用保存的寄存器的值和合适的address space设置好CPU.
struct Env和xv6中struct proc是类似的,它们两个都将user mode中的寄存器状态存在Trapframe结构中。但是在JOS中一个environment没有拥有它自己的kernel stack,也就是相当所有evniroments所使用的kernel stack都是一样的(xv6是有的),所以在kernel的某一个时间点只能有一个JOS environment,因此JOS有一个kernel stack就好了。
Lab中我们只需初始化一个environment,但是你需要将JOS设计成支持多个environments的。
Allocating the Environments Array
在kern/pmap.c中添加envs的内存分配以及对envs的映射即可,在相应位置添加如下代码即可:
//////////////////////////////////////////////////////////////////////
// Make 'envs' point to an array of size 'NENV' of 'struct Env'.
// LAB 3: Your code here.
envs = (struct Env *)boot_alloc(NENV * sizeof(struct Env));
memset(envs, 0, NENV * sizeof(struct Env));
//////////////////////////////////////////////////////////////////////
// Map the 'envs' array read-only by the user at linear address UENVS
// (ie. perm = PTE_U | PTE_P).
// Permissions:
// - the new image at UENVS -- kernel R, user R
// - envs itself -- kernel RW, user NONE
// LAB 3: Your code here.
boot_map_region(kern_pgdir, UENVS, PTSIZE, PADDR(envs), PTE_U);
Creating and Running Environments
接下去就是创建和运行一个environment了,因为我们还没有文件系统,所以kernel会加载一个静态二进制镜像,将它嵌入到内核中,JOS将它作为一个ELF可执行image。在kern/init.c中的i386_init()函数中将会有代码让environment运行这些二进制镜像。为了可以让其真正的运行起来,我们需要在env.c中补充完成一些函数。
我们首先需要补充的是env_init,这个函数主要做的工作是初始化envs数组中所有的Env结构体(Env结构体中的env_ids设置为0),并且将它们添加到env_free_list中,同时需要保证env_free_list中的Env顺序是与envs数组中的顺序是一样,也就是说当我们第一次调用env_alloc()的时候,分配给我们的是envs[0]。所添加的代码如下,除了env_ids设置为0之外,对Env结构的其他属性也进行了初始化。
void
env_init(void)
{
// Set up envs array
// LAB 3: Your code here.
int i;
for(i = 0; i < NENV; i++){
if(i == NENV - 1){
envs[i].env_link = NULL;
}else{
envs[i].env_link = &envs[i+1];
}
envs[i].env_id = 0;
envs[i].env_parent_id = 0;
envs[i].env_type = ENV_TYPE_USER;
envs[i].env_status = ENV_FREE;
envs[i].env_runs = 0;
envs[i].env_pgdir = NULL;
}
env_free_list = envs;
// Per-CPU part of the initialization
env_init_percpu();
}
再接下去是env_setup_vm的实现,这个函数主要实现的是给一个新的environment分配一个page directory,并且初始化新environment地址空间的kernel位置,整体代码如下
static int
env_setup_vm(struct Env *e)
{
int i;
struct PageInfo *p = NULL;
// Allocate a page for the page directory
if (!(p = page_alloc(ALLOC_ZERO)))
return -E_NO_MEM;
// LAB 3: Your code here.
e->env_pgdir =(pde_t *)page2kva(p);
p->pp_ref++;
for(i = 0; i < PDX(UTOP); i++){
e->env_pgdir[i] = 0;
}
for(i = PDX(UTOP); i<NPDENTRIES; i++){
e->env_pgdir[i] = kern_pgdir[i];
}
// UVPT maps the env's own page table read-only.
// Permissions: kernel R, user R
e->env_pgdir[PDX(UVPT)] = PADDR(e->env_pgdir) | PTE_P | PTE_U;
return 0;
}
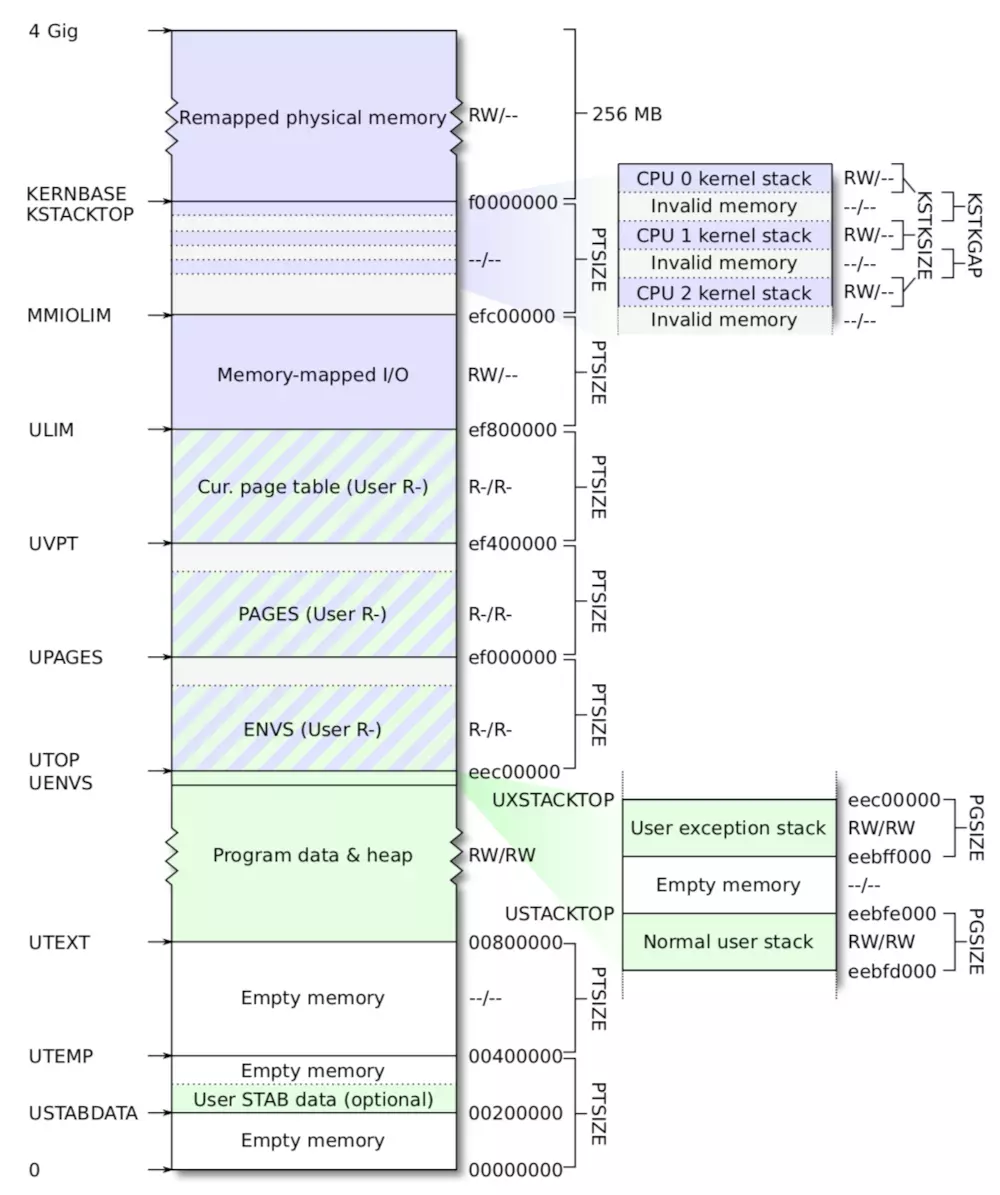
其中p = page_alloc(ALLOC_ZERO)分配了一个新的页用作page directory,所以需要将这个页的物理地址赋值给e->env_pgdir,同时该页的引用需要+1。接下去的两个循环中的代码是我没想到的,主要是对页目录进行初始化,因为从Lab2中的那张虚拟地址空间分布图,我们可以知道从UTOP以上在kern_pgdir中已经映射好了的,所有environment的地址空间都应该有这个映射,所以从UTOP到NPDENTRIES(页目录项最多为1024)为kern_pgdir中相应的内容。
在接下来是region_alloc函数的实现,region_alloc函数主要是给environment分配一块真正的物理内存(虚拟地址的开始处和内存的大小已经通过参数给定了),并对该内存进行映射(换句话说就是把这个分配的物理页insert到page table中)。实现主要借助了Lab2中的实现的一些函数,先通过page_alloc函数分配一块内存,然后通过page_insert函数实现映射。
static void
region_alloc(struct Env *e, void *va, size_t len)
{
// LAB 3: Your code here.
// (But only if you need it for load_icode.)
//
// Hint: It is easier to use region_alloc if the caller can pass
// 'va' and 'len' values that are not page-aligned.
// You should round va down, and round (va + len) up.
// (Watch out for corner-cases!)
uint32_t start = (uint32_t)ROUNDDOWN(va, PGSIZE);
uint32_t end = (uint32_t)ROUNDUP(va + len, PGSIZE);
struct PageInfo *p = NULL;
int re = -1;
for(; start<end; start += PGSIZE){
p = page_alloc(0);
if(p == NULL){
panic("the page allocation failed!\n");
}
re = page_insert(e->env_pgdir, p, (void *)start, PTE_U | PTE_W);
if(re != 0){
panic("the page insert failed!\n");
}
}
}
load_icode()函数是把要执行的程序加载到environment的地址空间中(这就意味着需要先分配一个实际存放的物理地址,之后需要进行映射),所以会调用上面已经实现的region_alloc函数。整体的实现类似于boot loader中加载ELF文件的那样,只是一个是从硬盘中加载一个是从已加载到内存的内核中加载。所以在实现这部分代码的时候,我们可以参考boot loader中加载内核程序的步骤。
static void
load_icode(struct Env *e, uint8_t *binary)
{
// LAB 3: Your code here.
struct Elf *elf_head = (struct Elf *)binary;
struct Proghdr *ph,*eph ;
if(elf_head->e_magic != ELF_MAGIC){
panic("load_icode:the file is not elf!\n");
}
if(elf_head->e_entry == 0){
panic("load_icode:the entry is null\n");
}
e->env_tf.tf_eip = elf_head->e_entry;
ph = (struct Proghdr *)((uint8_t *)elf_head + elf_head->e_phoff);
eph = ph + elf_head->e_phnum;
lcr3(PADDR(e->env_pgdir));
for(; ph < eph; ph++){
if(ph->p_type == ELF_PROG_LOAD){
if(ph->p_filesz > ph->p_memsz){
panic("load_icode:the filesz > memsz!\n");
}
region_alloc(e, (void *)ph->p_va, ph->p_memsz);
memmove((void *)ph->p_va, binary+ph->p_offset, ph->p_filesz);
memset((void *)(ph->p_va + ph->p_filesz), 0, ph->p_memsz- ph->p_filesz);
}
}
// Now map one page for the program's initial stack
// at virtual address USTACKTOP - PGSIZE.
region_alloc(e, (void *)(USTACKTOP-PGSIZE), PGSIZE);
// LAB 3: Your code here.
}
在上述代码中,我们需要对elf文件的e_magic进行判断,判断它是不是一个ELF文件,之后判断入口地址是不是存在,同时我们需要这一步:e->env_tf.tf_eip = elf_head->e_entry;,该步在调用enviroment中二进制程序的时候会用到,同时lcr3(PADDR(e->env_pgdir));这一步我个人的理解是,因为下面的加载操作都是把ELF文件加载到该environment的地址空间中,所以需要使用这个地址空间的page directory。假如不加载进程自己的页表,还是使用kernel使用的页表,那么针对同样的虚拟地址,那么很有可能把kernel的某些数据给覆盖了,所以这是不行的。
env_create函数主要是创建一个environment,首先是要分配得到一个Env结构体,之后是将这个environment的类型进行标记,再之后就是把要执行的程序加载到这个environment中。
void
env_create(uint8_t *binary, enum EnvType type)
{
// LAB 3: Your code here.
struct Env *e;
if(env_alloc(&e, 0) != 0){
panic("env_create faild!\n");
}
e->env_type = type;
load_icode(e, binary);
}
最后的最后就是env_run,这个函数的功能就是让这个environment运行起来,因为environment要运行起来了,那么相应的env_status和env_runs都要进行修改,同时地址空间也要变成这个environment的了,所以需要lcr3(PADDR(curenv->env_pgdir));.
void
env_run(struct Env *e)
{
// LAB 3: Your code here.
if(curenv != NULL && curenv->env_status == ENV_RUNNING){
curenv->env_status = ENV_RUNNABLE;
}
curenv = e;
curenv->env_status = ENV_RUNNING;
curenv->env_runs ++;
lcr3(PADDR(curenv->env_pgdir));
env_pop_tf(&(curenv->env_tf));
panic("env_run not yet implemented");
}
实现上述进程的相关函数之后,总体来看一下用户代码运行之前,按顺序会调用的代码:
start (kern/entry.S)
i386_init (kern/init.c)
cons_init
mem_init
env_init
trap_init (still incomplete at this point)
env_create
env_run
env_pop_tf
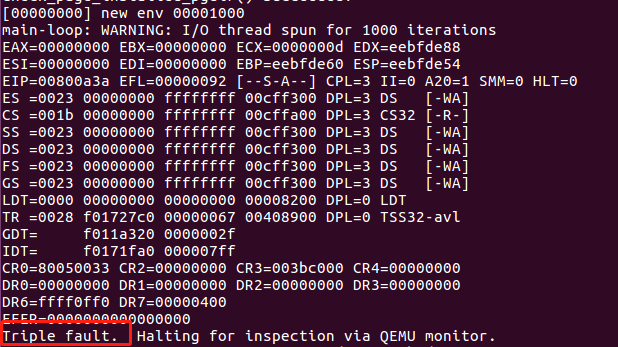
将上述代码完成之后,当你编译整个JOS内核代码的并运行在qemu上的时候,它会成功运行。系统会进入用户空间并且执行hello二进制程序直到它使用int指令调用system call。由于JOS在硬件上还没有允许user mode到kernel mode的转换,所以这将会出错。当CPU发现还没有设置处理system call中断的时候,它将会产生一个通用的保护异常;当发现不能处理这个保护异常的时候,又会产生一个not present fault(double fault),结果发现两个都不能处理,最后以“triple fault”放弃。
一旦产生上述的
triple fault之后,CPU将会重置系统将会重启,但是6.828给qemu打了一个补丁,所以你将会看见寄存器转储和一条"Triple fault"消息。
下面我们通过调试来发现上述的triple fault,并且检查是否进入了user mode。依次使用make qemu-nox-gdb和make gdb之后,先是在env_pop_tf处设置一个断点,这个函数是进入user mode之前的最后一个函数。
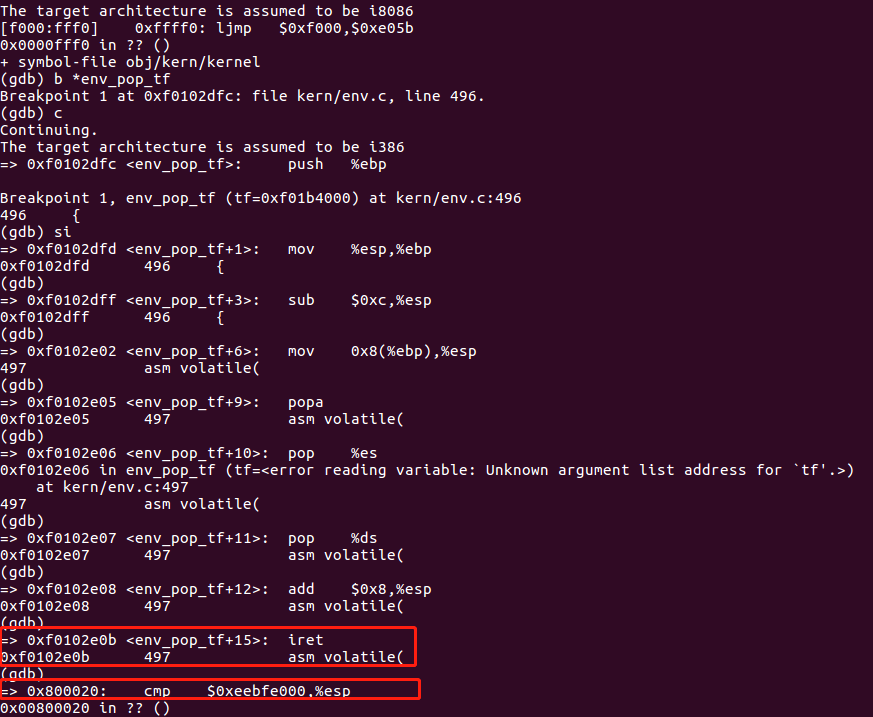
运行到这个函数之后,使用单步调试指令si,在iret指令之后将会进入user mode,这时候你将会看到user environment的执行程序的第一条指令cmp。
现在我们使用b*0x...指令在int $0x30处打上一个断点,我们通过查看obj/user/hello.asm来找到int $0x30这个指令的地址,
asm volatile("int %1\n"
800a29: b8 00 00 00 00 mov $0x0,%eax
800a2e: 8b 4d 0c mov 0xc(%ebp),%ecx
800a31: 8b 55 08 mov 0x8(%ebp),%edx
800a34: 89 c3 mov %eax,%ebx
800a36: 89 c7 mov %eax,%edi
800a38: 89 c6 mov %eax,%esi
800a3a: cd 30 int $0x30
可以看到int $0x30的地址为800a3a,这个int指令将会调用system call,效果是将会在控制台上打印一个字符。但是由于我们没有实现相应的system call中断的处理,这个处理产生的异常也法处理,所以我们将会看到"Triple fault"。下面我们在800a3a处设置断点,并使用c命令执行都该处(PS:下图中的v纯属手误,可以忽略):

如果你在调试过程中发现不能执行到int指令处,那么上述实验中所写的代码是有误的。
Handling Interrupts and Exceptions
基础知识
首先我们了解下x86的中断和异常机制,可以查看80386的手册_中断和异常,也可以参考本目录中的”appendix_80386手册.md“。
异常和中断会造成处理器从user mode 转换到kernel mode(CPL=0),这样子可以让user-mode code没有任何机会接近kernel的函数或者其他environment。在Intel中中断通常是由处理器外的异步事件产生,比如device I/O的提示等;而异常往往是由当前运行的代码同步产生的,比如除以0或者访问一个无效的地址。每一个中断或异常都有一个中断向量,中断向量是由中断的来源决定的:比如不同的device、error conditions、应用程序对内核的请求都将会产生一个中断向量。x86处理器使用中断向量0~31来表示x86内部产生的同步异常(比如page fault是14),比31大的中断向量仅仅被用于software interrupts(比如由int 指令引发的)或者不同步的hardware interrupts(由外部devices产生)。
为了确保中断/异常发生时不是自主选择kernel的进入点以及进入的方式,而是在一定的控制条件下,从一些特定、提前定义好的进入点进入内核,那么处理器从以下两方面实现上述的保护:
- Interrupt Descriptor Table
x86允许通过256个不同中断或异常的进入点进入kernel,256个中断或异常都有唯一一个中断向量(从0~255)。CPU使用中断向量作为IDT表(IDT表建立在kernel-private 内存中)的index,然后从适当的table条目( Interrupt Descriptor)中加载
-
要加载到EIP(instruction pointer)寄存器的值,这个值指向了处理指定异常的kernel处理代码;
-
要加载到CS(code segement)寄存器的值,值里面包含了第0-1位的特权等级值,异常处理程序正是运行在这个特权等级下。(JOS中所有的异常都是在kernel mode下处理的,特权等级全都为0)
-
Task State Segment
因为中断或异常处理的时候会从用户态模式转到内核态模式,那么在处理器调用异常处理程序之前,需要一块空间来保存old process的状态(比如EIP和CS),这样子异常处理程序执行完成之后可以通过old state,从中断发生离开时的那个地方重新开始。但是这块空间必须是没有特权的user-mode code不能访问的,否则用户恶意的代码或者bug会危及内存,因此会在内核空间中选择一个stack来存储。TSS(task state segement)这个结构中就指明了segement selector和stack的地址。那么之后会把SS、ESP、EFLAGS、CS、EIP的值以及可选的error code的值压入到新栈中。然后从IDT表中的Interrupt Descriptor中加载CS和EIP,并设置ESP和SS指向新的栈。
TSS可能有其他用途,但是JOS只把TSS用于定义一个内核栈,这个栈是用户态模式转换到内核态模式时该选择的。JOS的内核态模式的特权等级为0,在进入内核的时候处理器使用TSS中的ESP0和SS0来定义kernel stack,TSS中的其他位则不用。
下面取个例子,假设处理器正在一个user environment中处理代码,但是它遇到了一个divide指令要除以0,此时会产生异常,接下去:
-
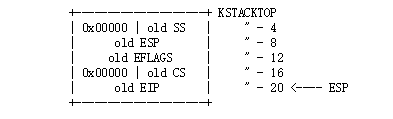
处理器通过TSS中SS0和ESP0(在JOS中TSS保存着GD_KD和KSTACKTOP)来定义一个kernel stack;
-
处理器把相关参数压入从KSTACKTOP开始的栈中,如下
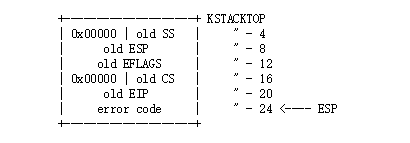
对于某些类型的x86异常,除了上述内容之外,可能还会压入error code(比如page fault)。那么这个栈看起来如下所示:
-
由于divide的中断向量是0,所以处理器会读取IDT的entry 0,然后设置CS:EIP指向相应的处理函数
-
处理函数开始处理异常,比如关掉user environment
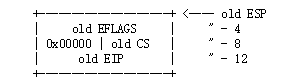
但是无论是在kernle mode下或者user mode下,都可能再次发生中断或者异常,假如在kernel mode下发生了中断或异常(CS寄存器低两位的值为0,比如说在异常或中断的处理过程中还会发生中断或者异常),那么此时会把更多的值压入相同的kernel stack,这样kernel就可以处理嵌套的异常(system call中会用到这种)。由于使用的是同一个stack,所以不用保存SS和ESP寄存器的值了,那么对于一个不用把error code压入的异常类型来说,栈变化如下:
而对于有error code的异常来说,只需要再压入一个error code就可以。另外对于嵌套的异常来说,假如在异常处理过程又出现异常或中断,但是又不能把old state的值压入栈中,那么处理器则简单的重启。
实验---IDT表的建立
现在我们要建立IDT表去处理0~31的中断向量,inc/trap.h定义了中断和异常的中断向量,这些对于user-level的程序或者libraries是有用的,而kern/trap.h 是trap.c中一些函数的声明,但是这些函数仅仅属于kernel的,kern/trap.h中有以下这些内容:
#ifndef JOS_KERN_TRAP_H
#define JOS_KERN_TRAP_H
#ifndef JOS_KERNEL
# error "This is a JOS kernel header; user programs should not #include it"
#endif
我们要实现的整体控制流程如下图所示

在kern/trapentry.S中每一个异常或中断都要有它自己的handler,而在trap_init()需要用这些handler的地址来初始化IDT。每一个handler都应该在stack上建立一个struct Trapframe,然后调用trap.c中的trap()函数,trap()函数中处理中断/异常或调用另一个特别的处理函数来处理。
首先我们根据上述要求在kern/trapentry.S每一个异常或中断都要有自己的handler,那么下面我们来看一下这个文件
#define TRAPHANDLER(name, num) \
.globl name; /* define global symbol for 'name' */ \
.type name, @function; /* symbol type is function */ \
.align 2; /* align function definition */ \
name: /* function starts here */ \
pushl $(num); \
jmp _alltraps
#define TRAPHANDLER_NOEC(name, num) \
.globl name; \
.type name, @function; \
.align 2; \
name: \
pushl $0; \
pushl $(num); \
jmp _alltraps
这个文件中有两个宏定义分别是TRAPHANDLER和TRAPHANDLER_NOEC,其实这两个宏定义的作用就是创建一个函数,函数名为传入的参数值name,另一个参数是中断向量,两个宏定义唯一的区别是前者会自动压入error code,而后者是压入一个0值来代替error code,所以我们需要根据这个中断/异常有无error code来选择哪个宏定义来创建(Hint:是否有error code 可以参考这个网址:https://pdos.csail.mit.edu/6.828/2018/readings/i386/s09_10.htm),接下去我们就根据这个链接的内容来创建handlers,这样子在kern/trapentry.S中每一个异常或中断自己的handler了。
/*
* Lab 3: Your code here for generating entry points for the different traps.
*/
TRAPHANDLER_NOEC(divide_handler, T_DIVIDE)
TRAPHANDLER_NOEC(debug_handler, T_DEBUG)
TRAPHANDLER_NOEC(nmi_handler, T_NMI)
TRAPHANDLER_NOEC(brkpt_handler, T_BRKPT)
TRAPHANDLER_NOEC(oflow_handler, T_OFLOW)
TRAPHANDLER_NOEC(bound_handler, T_BOUND)
TRAPHANDLER_NOEC(illop_handler, T_ILLOP)
TRAPHANDLER_NOEC(device_handler, T_DEVICE)
TRAPHANDLER(dblflt_handler, T_DBLFLT)
TRAPHANDLER(tss_handler, T_TSS)
TRAPHANDLER(segnp_handler, T_SEGNP)
TRAPHANDLER(stack_handler, T_STACK)
TRAPHANDLER(gpflt_handler, T_GPFLT)
TRAPHANDLER(pgflt_handler, T_PGFLT)
TRAPHANDLER_NOEC(fperr_handler, T_FPERR)
TRAPHANDLER_NOEC(align_handler, T_ALIGN)
TRAPHANDLER_NOEC(mchk_handler, T_MCHK)
TRAPHANDLER_NOEC(simderr_handler, T_SIMDERR)
TRAPHANDLER_NOEC(syscall_handler, T_SYSCALL)
每一个handler都要建立自己的struct Trapframe,并且最后要调用trap()函数,而每一个handler都会跳转到_alltraps,所以我们需要在_alltraps中实现上述要求即可。 根据Lab中的提示,_alltraps实现如下
/*
* Lab 3: Your code here for _alltraps
*/
_alltraps:
pushl %ds
pushl %es
pushal
movl $GD_KD, %eax
movl %eax, %ds
movl %eax, %es
pushl %esp
call trap
在kern/trapentry.S中已经实现了异常/中断的handler(也就相当添加了相应的entry pointer),那么下面我们需要在trap_init()函数中把这些给添加到IDT中。根据kern/trapentry.S中的提示
* You shouldn't call a TRAPHANDLER function from C, but you may
* need to _declare_ one in C (for instance, to get a function pointer
* during IDT setup). You can declare the function with
* void NAME();
* where NAME is the argument passed to TRAPHANDLER.
上述的个人理解是:在实现的trap_init()的时候,因为我们不能直接在这个函数里面调用trapentry.S中一系列handler函数,我们需要在C中先声明。再接下来我们看一下Lab中的提到使用SETGATE:#define SETGATE(gate, istrap, sel, off, dpl),gate是IDT表的index入口(IDT相应的表项),istrap是选择是trap gate还是interrupt gate,sel为中断/异常处理器程序所在段的segement selector,off表示相对偏移量,dpl代表相应的权限等级(软件调用所需要的权限)。最终实现如下:
void
trap_init(void)
{
extern struct Segdesc gdt[];
// LAB 3: Your code here.
void divide_handler();
void debug_handler();
void nmi_handler();
void brkpt_handler();
void oflow_handler();
void bound_handler();
void illop_handler();
void device_handler();
void dblflt_handler();
void tss_handler();
void segnp_handler();
void stack_handler();
void gpflt_handler();
void pgflt_handler();
void fperr_handler();
void align_handler();
void mchk_handler();
void simderr_handler();
void syscall_handler();
SETGATE(idt[T_DIVIDE], 0, GD_KT, divide_handler, 0);
SETGATE(idt[T_DEBUG], 0, GD_KT, debug_handler, 0);
SETGATE(idt[T_NMI], 0, GD_KT, nmi_handler, 0);
SETGATE(idt[T_BRKPT], 0, GD_KT, brkpt_handler, 3);
SETGATE(idt[T_OFLOW], 0, GD_KT, oflow_handler, 0);
SETGATE(idt[T_BOUND], 0, GD_KT, bound_handler, 0);
SETGATE(idt[T_ILLOP], 0, GD_KT, illop_handler, 0);
SETGATE(idt[T_DEVICE], 0, GD_KT, device_handler, 0);
SETGATE(idt[T_DBLFLT], 0, GD_KT, dblflt_handler, 0);
SETGATE(idt[T_TSS], 0, GD_KT, tss_handler, 0);
SETGATE(idt[T_SEGNP], 0, GD_KT, segnp_handler, 0);
SETGATE(idt[T_STACK], 0, GD_KT, stack_handler, 0);
SETGATE(idt[T_GPFLT], 0, GD_KT, gpflt_handler, 0);
SETGATE(idt[T_PGFLT], 0, GD_KT, pgflt_handler, 0);
SETGATE(idt[T_FPERR], 0, GD_KT, fperr_handler, 0);
SETGATE(idt[T_ALIGN], 0, GD_KT, align_handler, 0);
SETGATE(idt[T_MCHK], 0, GD_KT, mchk_handler, 0);
SETGATE(idt[T_SIMDERR], 0, GD_KT, simderr_handler, 0);
SETGATE(idt[T_SYSCALL], 0, GD_KT, syscall_handler, 3);
// Per-CPU setup
trap_init_percpu();
}
上述有两个dpl设置为3,我们在后面可以看到为什么设置为3,当然设置为0对PartA来说没有啥影响。
最后我们使用make grade来测试一下,如下所示表示可以了!
question
-
为什么要对每个中断向量设置不同的中断处理函数,而不是放在一个函数里面统一处理呢?
因为不同中断或异常有不同的处理方式,TRAPHANDLER在栈中压入了中断向量trapno和错误码errno,在以方便后面根据异常/中断类型做对应处理。
-
为什么
user/softinit.c程序调用的是int $14,但是报的错是13呢(general protection fault)?这是因为softinit.c是一个用户程序,它CPL=3,而中断向量14中的DPL设置的是0(表示需要权限为0的软才能调用),所以会触发13异常。
appendix:关于CPU和程序的执行
在CPU进行进程切换的时候,需要将寄存器中和当前进程有关的状态数据写入内存对应的位置(内核中该进程的栈空间)保存起来,当切换回该进程时,需要从内存中拷贝回寄存器中。即上下文切换时,需要保护现场和恢复现场。
除了嵌入式系统,多数CPU都有两种工作模式:内核态和用户态。这两种工作模式是由PSW寄存器上的一个二进制位来控制的。内核态的CPU,可以执行指令集中的所有指令,并使用硬件的所有功能。用户态的CPU,只允许执行指令集中的部分指令。一般而言,IO相关和把内存保护相关的所有执行在用户态下都是被禁止的,此外其它一些特权指令也是被禁止的,比如用户态下不能将PSW的模式设置控制位设置成内核态。用户态CPU想要执行特权操作,需要发起系统调用来请求内核帮忙完成对应的操作。其实是在发起系统调用后,CPU会执行trap指令陷入(trap)到内核。当特权操作完成后,需要执行一个指令让CPU返回到用户态。

